|
|
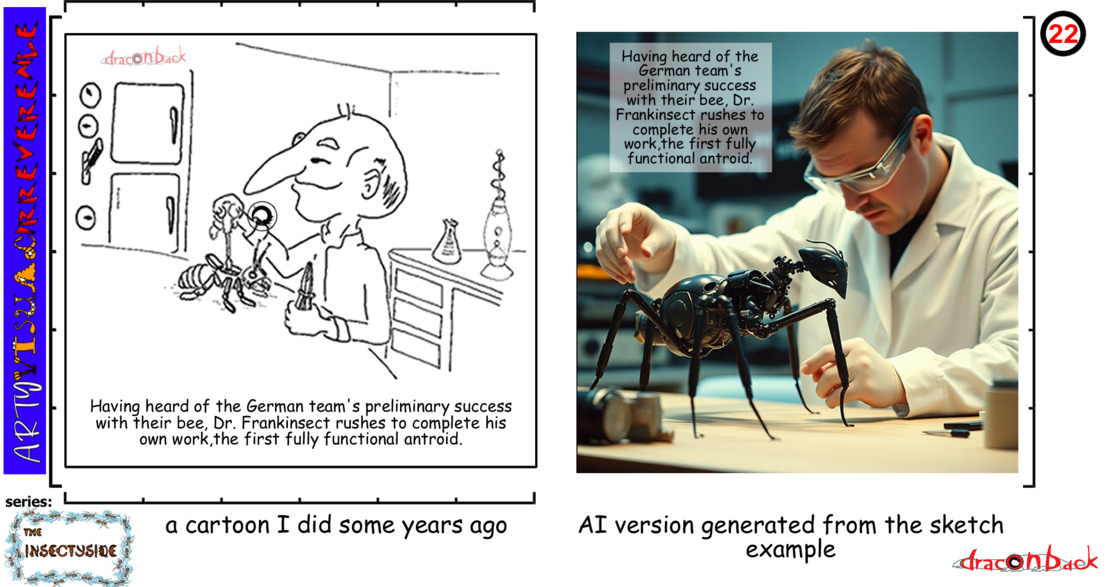
Invertebrates with hard-shells, comprised principally of the Crustaceans (crabs, lobsters, shrimp, etc.), Chelicerates (spiders, scorpions, ticks, etc.), and Uniramians (millipedes, centipedes, insects, etc.) are grouped under the term "arthropods", meaning "joint-feet". Arthropod should not be confused with the similar sounding word "anthropoid", meaning "man-like", from the Greek andros meaning "man"-- which is used to describe our distant ancestors and some of the great apes such as the gibbons, orangutans, gorillas, and chimpanzees. This greek root is also reflected in the word "android" which, as any science fiction fan could tell you, is a mechanical human.
|
 |
|
At the intersection of entomology and robotics lies a fascinating field of research: the development of insect-inspired robots and living insect cyborgs. These technologies harness the evolutionary advantages of insects—their incredible sensory capabilities, efficient locomotion, and remarkable resilience—while enhancing them with electronic components for practical applications that range from search and rescue to environmental monitoring. |
For decades, roboticists have sought to replicate the extraordinary capabilities of insects. With their six legs providing stable tripod gaits, ability to navigate diverse terrains, and capacity to lift many times their body weight, insects represent near-perfect models for small-scale robotics. Intelligence agencies pioneered early insect-inspired surveillance technology. |
|
|
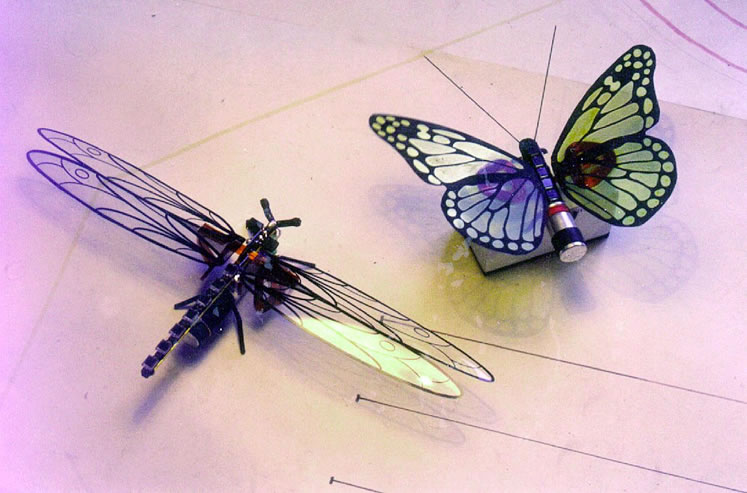
The Insectothopter, a miniature unmanned aerial vehicle (UAV) developed by the CIA in the 1970s, represented a groundbreaking early attempt at insect-inspired espionage. This mechanical dragonfly, measuring just a few inches long, contained a miniature gasoline engine that powered flapping wings, along with a tiny microphone for audio surveillance. Though ultimately deemed impractical for field operations due to its vulnerability to crosswinds and limited flight control capabilities, the Insectothopter laid crucial groundwork for future developments. This Cold War-era prototype demonstrated both the strategic value and technical challenges of insect-scale surveillance systems decades before modern materials science and microelectronics would make more advanced versions viable.
|
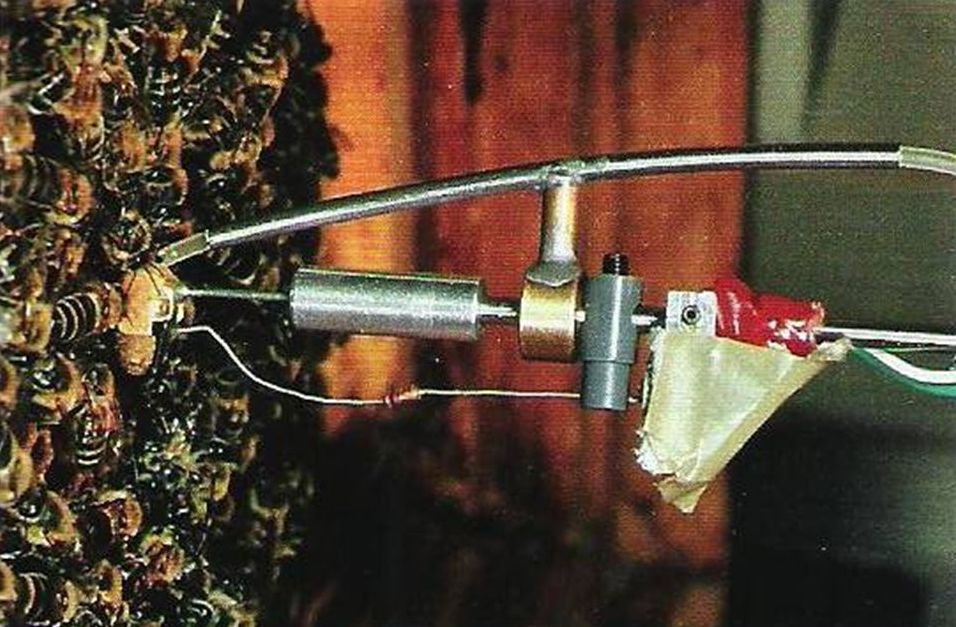
In the early 1990s, Axel Michelsen, Martin Lindauer, and Wolfgang Kirchner developed a computer-controlled robotic bee designed to replicate the movements of a dancing honeybee. Their experiments demonstrated that real bee recruits responded to the robot’s programmed dance angles by searching for food in the indicated directions.
|
|
|
Adjustments to the length of the robot’s dances influenced the distances at which recruits were captured, though the recruitment was somewhat imprecise compared to natural bee dances. Despite this variability, the ability to alter search distributions simply by modifying the robot’s programming provided conclusive evidence that honeybee recruits decode both distance and direction information from dance communication. |
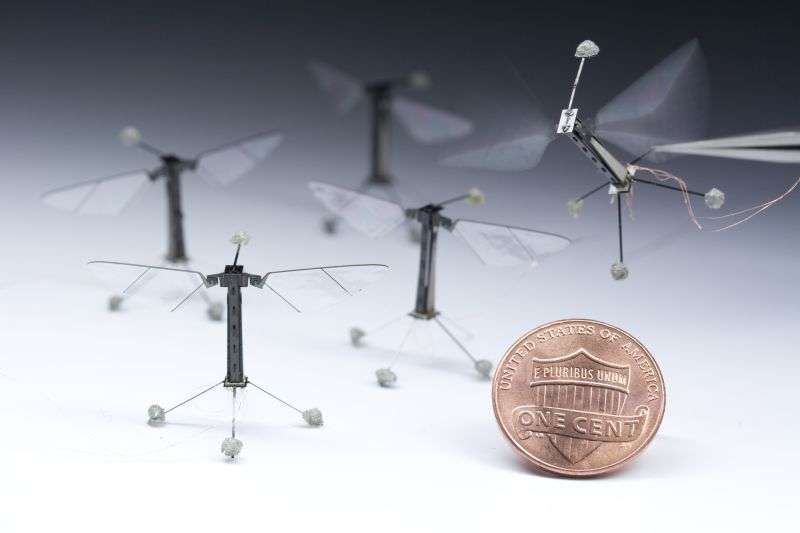
In 2012 Harvard Microrobotics Laboratory's RoboBee launched, literally and figuratively, a tiny flying robot with a wingspan comparable to a real bee, capable of controlled flight maneuvers using artificial muscles powered by piezoelectric actuators. |
|
 |
The latest iteration features water-to-air transition capabilities, meaning it can dive, swim, and then take off again. Applications might include pollination, search-and-rescue reconnaisance, environmental monitoring and surveillance. |
Similarly, Stanford's cockroach-inspired robot can withstand crushing forces by collapsing its exoskeleton-like frame and continuing to move even when compressed to a fraction of its height. These designs demonstrate how biomimicry—the imitation of natural systems—can solve complex engineering challenges. By understanding the mechanical principles that allow cockroaches to squeeze through tiny crevices or mantises to strike with lightning speed, engineers develop robots with unprecedented capabilities.
|

|
 |
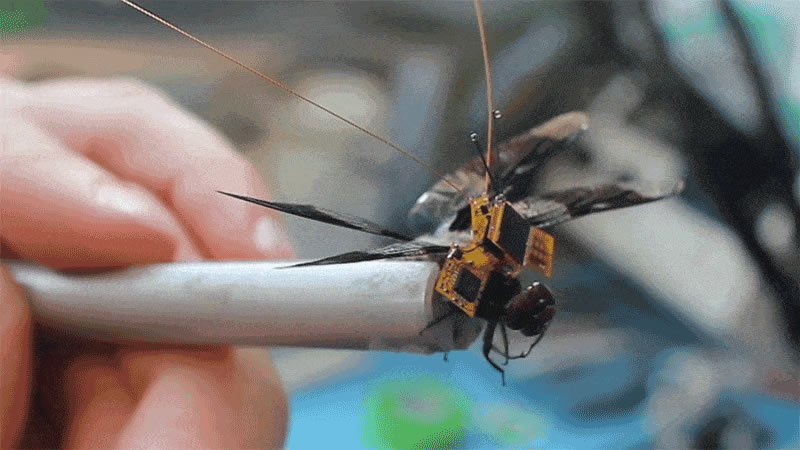
While fully mechanical insect robots represent one avenue of research, another approach involves creating true cyborgs—living insects augmented with electronic components. The Defense Advanced Research Projects Agency (DARPA) has funded research into "hybrid insect micro-electro-mechanical systems," effectively turning living insects into partially controllable reconnaissance devices. |
In these systems, typically involving cockroaches or beetles, tiny electronic backpacks are mounted on the insects, with electrodes connected to their nervous systems. By delivering mild electrical stimuli to specific neurons, researchers can influence the insect's movement, essentially creating a biological drone navigable by remote control. Some systems even harvest energy from the insect's own wing movements or biochemical processes, creating self-sustaining biohybrid systems.
|
|
|
In 2025, scientists at the University of Tsukuba in Japan have successfully transformed cicadas into cyborg insects capable of playing Pachelbel’s Canon in D. By attaching removable electrodes to the cicadas' tymbals—the specialized sound-producing organs—researchers were able to stimulate the insects to create musical tones. The cicadas weren’t restrained and flew away unharmed after their performances, demonstrating a fascinating blend of biology and technology. This experiment highlights the potential for insect-computer hybrid interfaces, which could one day be used for low-power acoustic actuators or even emergency warning systems. |
Studying and adapting the solutions that insects have refined over millions of years of evolution, suggests powerful new approaches to some of our most pressing technological challenges. The practical applications are numerous: precision agriculture where insect robots pollinate crops; medical micro-robots inspired by parasitic wasps capable of targeted drug delivery; environmental monitoring systems using swarms of autonomous sensors with insect-like adaptability. |
|
| |
|